After months spent at Zoo Atlanta, an engineer at Georgia Tech says he’s created a robot for search and rescue missions based on the way snakes move.
Such robots need to be flexible enough to move over uneven surfaces, able to climb slopes and small enough to get into tight spaces – without requiring large amounts of energy or risking overheating.
“By using their scales to control frictional properties, snakes are able to move large distances while exerting very little energy. During rectilinear locomotion, a snake doesn’t have to bend its body laterally to move,” says mechanical engineering PhD candidate Hamid Marvi.
“Snakes lift their ventral scales and pull themselves forward by sending a muscular traveling wave from head to tail. Rectilinear locomotion is very efficient, and is especially useful for crawling within crevices, an invaluable benefit for search-and-rescue robots.”
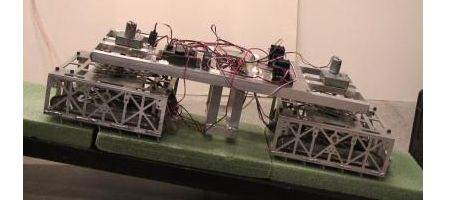
While studying and videotaping the movements of 20 different species at the zoo, Marvi developed Scalybot 2. It can automatically change the angle of its scales when it encounters different terrains and slopes, allowing it to either fight or generate friction.
The two-link robot is controlled by a remote-controlled joystick and can move forward and backward using four motors.
“Snakes are highly maligned creatures,” says Joe Mendelson, curator of herpetology at Zoo Atlanta. “I really like that Hamid’s research is showing the public that snakes can help people.”
Last summer the team developed Scalybot 1, a two-link climbing robot that replicates concertina locomotion. The push-and-pull, accordion-style movement features alternating scale activity.