
When a robot performs an action, it is typically scripted and very precise.
Meaning, if the situation changes and the script is no longer accurate, most robotic systems are unable to make adjustments on the fly to perform accurately and correctly. However, this may change in the future.
Indeed, a team of students from MIT – led by Jennifer Barry and Annie Holladay – have created a number of robotic algorithms in an effort to help them gain new abilities.
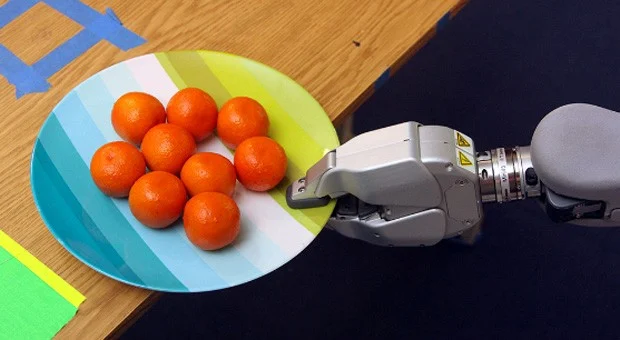
The sections of the algorithm that Barry was responsible for allows a robotic arm to do things like slide a plate until the edge hangs off of the table, making it easier to pick up.
Meanwhile, Holladay coded sections of the algorithm in an effort to transform a collision detection system into a set of instructions that allows robots to balance a delicate object with one free arm before setting the it down on a flat surface.
The ultimate goal of Barry and Holladay? To create robots capable of dynamically altering their behavior to better suit the environment and task at hand.




